1 摘要 悬索桥涡振期间起伏的桥面会影响行车视线,造成远盲区漂移多变的现象,从而对行驶安全造成威胁。为了确保涡振条件下悬索桥桥面行车安全性,有必要在线感知在此条件下行车视线被遮挡造成远盲区,研究其变化规律,并建立行车安全的在线感知评判机制 。本文以一座发生竖弯涡激共振的大跨度悬索桥为工程背景,首先利用实时在线加速度积分算法和正弦函数拟合动构型方法,实现基于桥面加速度振动监测的主梁实时动构形在线感知;然后根据主梁实时动构型,精确计算涡振期间驾驶员远盲区最大高度和有效视距,进而得以探讨不同行车条件对两者的影响。结果表明,车辆在桥上行驶的过程中,车内驾驶员视觉远盲区最大高度和有效视距呈现周期性变化;车内驾驶员目高越低,驾驶员视线远盲区最大高度也就越高,有效视距越小;此外,随着车速的增加,驾驶员行车视觉远盲区最大高度和有效视距均减小;而且,车辆在涡振波谷为0时入桥,相比其他时刻,驾驶员盲区出现次数和最大高度超过10cm最少。同时表明,该框架能实时、准确在线感知在不同车型、车速和车辆入桥时刻,下车辆在桥上行驶的过程中远盲区最大高度及有效视距。
1
悬索桥涡振期间起伏的桥面会影响行车视线,造成远盲区漂移多变的现象,从而对行驶安全造成威胁。为了确保涡振条件下悬索桥桥面行车安全性,有必要在线感知在此条件下行车视线被遮挡造成远盲区,研究其变化规律,并建立行车安全的在线感知评判机制 。本文以一座发生竖弯涡激共振的大跨度悬索桥为工程背景,首先利用实时在线加速度积分算法和正弦函数拟合动构型方法,实现基于桥面加速度振动监测的主梁实时动构形在线感知;然后根据主梁实时动构型,精确计算涡振期间驾驶员远盲区最大高度和有效视距,进而得以探讨不同行车条件对两者的影响。结果表明,车辆在桥上行驶的过程中,车内驾驶员视觉远盲区最大高度和有效视距呈现周期性变化;车内驾驶员目高越低,驾驶员视线远盲区最大高度也就越高,有效视距越小;此外,随着车速的增加,驾驶员行车视觉远盲区最大高度和有效视距均减小;而且,车辆在涡振波谷为0时入桥,相比其他时刻,驾驶员盲区出现次数和最大高度超过10cm最少。同时表明,该框架能实时、准确在线感知在不同车型、车速和车辆入桥时刻,下车辆在桥上行驶的过程中远盲区最大高度及有效视距。
主要创新点
1.给出了涡振期间驾驶人行车有效视距的新定义;
2.建立了主梁涡振期间驾驶员行车视线远盲区最大高度和有效视距的精确计算方法;
3.探明了不同车型、车速和入桥时刻对驾驶人视线远盲区最大高度和有效视距的影响规律;
4.本文的研究成果有助于形成涡振期间主梁行车安全实时评估与干预决策机制,进而为智慧交通提供一种具体的车、路、桥协同感知应用场景。
2
行车盲区最大高度
桥梁发生竖向涡振时,桥面竖曲线因涡振振型而不同,且随振动周期变化。如果涡振振型是数个波峰和波谷的组合,那么当车辆位于波谷时驾驶人对前方邻近波谷的视线最容易受到前方波峰的阻挡。图1以3个半波的涡振振型为例,车辆位于涡振的波谷最大时,分析行车视线被遮挡造成的盲区。
假设在B2处有障碍物,则从B2后一段距离内,障碍物都将看不见。即车辆前进方向的邻近波谷区域存在一个视觉盲区。此时视觉盲区最大高度的为驾驶员盲区最大高度。
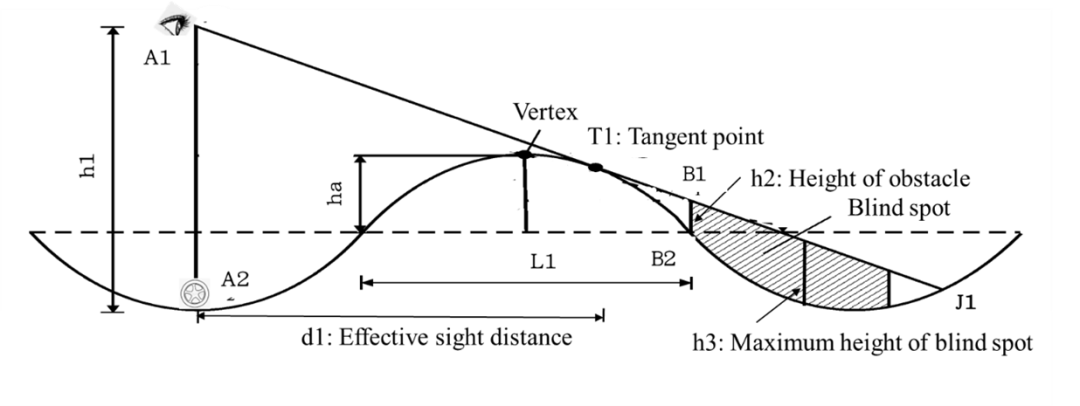
图1 涡振期间驾驶员的有效视距和盲区最大高度
有效视距
有效视距 (effective sight distance)是指在车辆正常行驶过程中,驾驶员从正常位置能够连续看到公路前方行车道范围内路面标线的最远距离。这里的距离是指沿车道中心量的长度。如图2所示,有效视距为眼睛到盲区起始点的水平距离,即A2到行车视线和曲线路面的切点T1的水平距离。
图2 驾驶员上坡行驶时的有效视距和停车视距示意图
3
本文利用布置在悬索桥主梁上的加速度传感器(如图4)的监测信息,建立 悬索桥涡振期间行车盲区最大高度及有效视距实时在线感知技术框架 。该框架需要实时加速度积分算法、全桥实时动构形的拟合算法、驾驶人行车视觉盲区最大高度及有效视距的理论计算,然后简单讨论行车安全的在线感知。(由于篇幅限制,在此仅介绍对行车盲区最大高度、有效视距和行车安全的在线感知框架,具体推导详见原文。)
图3 虎门大桥加速度传感器布置
为了实现对悬索桥涡振事件的行车安全在线感知,作者设计了一套 针对流式加速度监测数据的集成数据处理方案 ,来完成涡振时行车盲区最大高度及有效视距的计算。这一数据处理方案不仅能够在涡振条件下实时在线感知驾驶人远盲区,而且能实时精确计算与远盲区相关参数如盲区最大高度和有效视距。同时,该方案利用上一帧方程的解作为下一帧方程的初值,使求方程的解更加的准确和高效。图4给出这个处理方案的流程图。
该方案主要包括三个模块:
(1) 实时动构形模块 :加速度积分模块用于实现动位移的实时在线计算,其得到位移信号可与加速度采样频率相同,也可以以计算速度采样周期整数倍数的方式降低采样频率。该方法利用递归最小二乘法进行数据基线校正,通过递归高通滤波准确过滤监测加速度信号中的低频噪声,随后进行加速度信号进行同步积分,得到主梁在多个位置的动态位移。以位移为控制点,通过函数拟合实时生成各测点的动构形。
(2) 车辆在桥梁相对位置模块 :以车辆入桥为起始时刻,输入车辆相关参数如车速乘以时间,得到车辆在桥梁上的横坐标。将横坐标带入上一模块得到的动构形,最终获得车辆在桥梁的纵坐标。
(3) 行车视觉盲区感知模块 :由上一模块得到车辆在桥梁的位置,推导车辆所在位置的切线斜率,求得切线与水平的夹角,根据视高求眼睛的坐标,从眼睛做与构形相切的视线,视线相交于构形,感知视觉盲区,最后计算盲区最大高度和有效视距。
图4 悬索桥涡振条件下驾驶员视觉盲区最大高度
和有效视距在线感知流程图
另外规划了 基于主梁实时动构形监测的涡振期间全桥面行车安全在线感知流程 。该流程在前方案涡振下驾驶人行车盲区的在线感知三个模块的基础上,增加一个实时行车安全在线感知模块,如图5所示。
行车安全在线感知模块 :在行车安全监测系统使用的环境下,被检测对象(人,猫,狗等)进入驾驶人视觉盲区。哺乳动物所发出的特殊波长红外线被传感器捕获,传感器激活报警模块,至此完成一次完整的探测-处理-报警过程,如无监测对象进入盲区,则传感器保持静默。通过桥梁健康监测系统中加速度传感器的实时数据在线感知驾驶人行车视觉盲区,然后无线通讯手段,传递给车辆的智能算法中,判断行车安全,调整车速,为车辆自动驾驶服务。
图5 悬索桥涡振条件下行车安全在线感知流程图
4
作者基于虎门大桥加速度数据,主要讨论了 车型,车速,车辆入桥时刻 对盲区最大高度和有效视距的在线感知及其规律研究(车型影响结果如图6、7所示,详细探讨过程见原文获取链接)。
其中对影响盲区最大高度和有效视距的 主要因素是车型 ,其次是车速和车辆入桥时刻。具体表现在车内驾驶员目高越低,驾驶员视觉盲区最大高度也就越高,有效视距越小;随着车速的增加,盲区最大高度减小,有效视距减小;车辆在涡振波峰为0时入桥,盲区持续时间少,盲区最大高度小。各种因素对盲区都有一定的影响。但是如果各种因素综合起来,即最不利的情况,需要注意盲区的变化情况。比如高阶振型,大振幅,纵坡陡,小轿车高速驶入涡振波峰最大时,一定要注意视觉盲区,保证行车安全。
图6 在线感知涡振下不同车型的盲区最大高度
图7 涡振条件下不同车型对有效视距的感知
5
本文首次提出了在大跨悬索桥涡激振动下,驾驶人行车视觉盲区最大高度和有效视距在线感知框架。该框架也可适用于其它桥型。该框架特点不仅能够在线感知行车盲区最大高度和有效视距,而且还能在该条件下为行车安全提出合理的建议。驾驶人行驶在发生涡振桥梁上,盲区变化具有周期性。涡振振幅为厘米级,盲区最大高度变化幅度为厘米级,有效视距变化幅度为米级。车型是影响视觉盲区最大高度和有效视距大小的主要因素。通过桥梁健康监测系统中加速度传感器的实时数据,在线感知驾驶人行车视觉盲区最大高度和有效视距,然后借助无线通讯手段,传递给车辆的智能算法中,判断行车安全,调整车速,实现车辆自动驾驶,提高汽车-道路-桥梁协同性能,实现智慧交通功能。