
植物生态学在基因到全球尺度上研究植物与环境间的互作关系(Keddy 2007)。卫星遥感、载人飞机遥感和地面遥感为区域至全球尺度上的植物生态学研究提供了丰富的数据(Myneni and Ross 2012; Xie et al. 2008
植物生态学在基因到全球尺度上研究植物与环境间的互作关系(Keddy 2007)。卫星遥感、载人飞机遥感和地面遥感为区域至全球尺度上的植物生态学研究提供了丰富的数据(Myneni and Ross 2012; Xie et al. 2008 ) 。卫星遥感可以获取亚米级到千米级空间分辨率的遥感数据,用于区域到全球尺度上反演植被类型、植被覆盖度、地上生物量、叶面积指数以及冠层化学组成等(Gomez et al. 2019)。尽管卫星和载人飞机获取的遥感数据为全球尺度和区域尺度上生态学问题的解决提供了很好的数据支撑,但在时空分辨率、光谱分辨率以及受云层影响等方面仍无法满足某些植物生态学研究的需求。基于手持设备或者塔吊等获取的地面遥感数据,在时间耗费和面积代表性上同样存在较大限制。
近年来,无人机遥感技术愈发成熟并被广泛用于生态学研究。无人机可以获取高时空分辨率的近地面遥感数据,可以有效弥补地面遥感数据、卫星遥感数据以及载人飞机遥感数据的不足(Singh and Frazier 2018; Torresan et al.2017; Valbuena et al. 2020 ) 。近期,越来越多的无人机遥感生态应用案例相继发表,研究内容包括无人机遥感系统的组成及发展(Colomina and Molina 2014; Floreano andWood 2015; Hassanalian and Abdelkefi 2017; Watts et al. 2012 ) 、无人机遥感在农业(Perich et al. 2020; Yang et al. 2018;Zhang and Kovacs 2012)、资源管理(Oliveira et al. 2020; Shahbazi et al. 2014)、环境研究(Pichon et al. 2019; Wang et al. 2018;Whitehead and Hugenholtz 2014; Whitehead et al. 2014)以及生物多样性监测(Bagaram et al. 2018; Guo et al. 2016b)等方面的应用。也有学者率先对无人机遥感在生态学中的应用潜力进行了论述(Anderson and Gaston 2013; Lian and Wich2012; Valbuena et al. 2020)。本研究从遥感科学和植物生态学相结合的综合视角综述了无人机遥感在个体、种群、群落、生态系统和景观尺度的应用现状,同时探讨了其在应用方面的不足和挑战,以期为无人机遥感在植物生态学研究中的深入应用提供参考。
1. 研究方法
为了系统梳理无人机遥感在植物生态学中的应用现状,我们通过检索公式: TS( 主题 ) =("unmanned aerial vehicles") or TS ( 主题 )=("unmanned aircraft systems") or TS( 主题 )=(drones) or TS( 主题 ) =("unmanned aerial systems") andLANGUAGE:(English) 在 ISI Web of Science 数据库中对已发表的相关科技论文进行了检索。检索领域限定为遥感 (Remote Sensing ) 、生态学 (Ecology) 、农业多学科 (Agriculture Multidisciplinary) 、植物科学 (Plant Sciences) 或林学 (Forestry) 。同时将时间跨度 (TIME SPAN) 设定为 2004?2019 (13 August , 2019) ;将指标 (INDEXES) 设定为 “SCI-EXPANDED” ;将文章类型 (Article Type) 限定为研究论文 (research articles) 和综述论文 (review articles) 。最终,在数据库中检索到 1425 篇科技论文。去除与植物生态学不相关的研究后,我们对剩余的 354 篇研究案例和 46 篇综述论文进行了系统分析。
2. 无人机遥感系统和无人机遥感数据处理及分析
2.1 无人机遥感系统
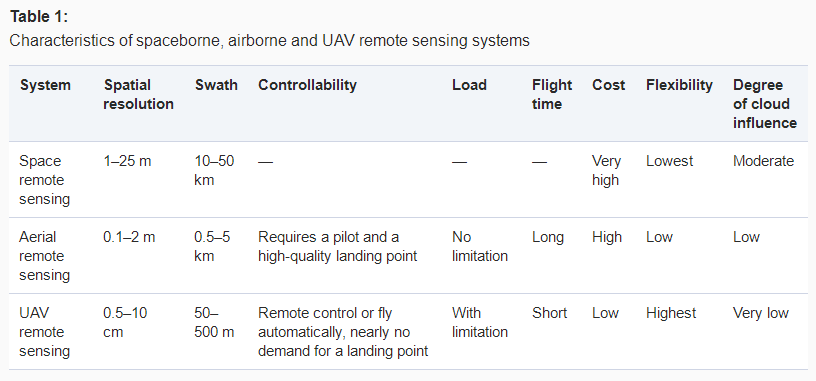
无人机遥感系统至少由飞行平台、传感器系统、地面控制与数据传输系统、数据处理系统和设备操控人员等五部分构成(Fig. 1)。有关飞行平台和传感器系统的介绍可以参照Watts et al. (2012)和Hassanalian and Abdelkefi (2017)的综述。本研究进一步总结了无人机遥感相较于传统空天遥感的优势所在(Table 1),低成本和高分辨率是非常重要的一个方面(Xie et al. 2015) 。无人机遥感可以根据实际需求随时获取厘米级分辨率的遥感数据,甚至可在雨天作业。超高分辨率的遥感数据使冠层参数,包括冠层结构和冠层动力参数的提取成为可能。此外,无人机起降灵活,操控容易,甚至可以在手上起飞和降落。最后,无人机遥感数据的获取可以避免云层的遮挡,在数据质量和数据获取频率方面更有优势。
![]()
Figure 1 The components of a UAV remote sensing system (adapted from Sun et al. 2017).
本研究结果显示,在354个研究案例中,多数案例采用了多旋翼无人机(64%)和固定翼无人机(26%)两种机型,三角翼和垂直起降的固定翼无人机也有少量应用(Fig.2 a)。约88%的研究案例使用成品无人机遥感系统,如DJI phantom和 senseFly eBee系列无人机,来采集数据(Fig.2b)。受到获取超高分辨率数据的意愿以及无人机飞行管理规定的影响,绝大多数的研究案例中,无人机的飞行高度都被设定在10-120m之间(Fig.2c) 。
![]()
Figure 2 Characteristics of UAVs used in plant ecology studies (a and b), including their flying altitudes (c).
2.2 无人机遥感数据处理和分析
可挂载到无人机上的传感器种类丰富,包括可见光相机、多光谱相机、高光谱相机、热红外相机和激光雷达等。可见光相机由于成本低,重量轻,使用方便等原因,是最为常用的一类传感器(Bagaram et al. 2018; Cunliffe et al. 2016;Pichon et al. 2019)。多光谱相机(如MicaSense RedEdge 3 camera, Micasense, WA, USA)能够提供更多波段的光谱信息(如red-edge: 760 nm; near-infrared [NIR]:810nm),常被用来评估植物健康和环境压力(Adam et al. 2010; Baluja et al. 2012; Wang et al. 2019b)。高光谱相机(如Cubert S185, Cubert, Ulm, Germany)可以获取更高光谱分辨率(<10nm)的连续光谱信息,因此被用于植物叶片生物化学成分的反演(Kwon et al. 2020; P?l?nen et al. 2013;Saarinen et al. 2018)。热红外相机可探测到目标的热辐射信息,因此常被用于获取植被表面温度和监测水分压力及火灾(Calderón et al. 2013; Messina and Modica2020; Smigaj et al. 2017)。激光雷达通过激光束的反射时间来计算目标物的距离,从而获取冠层结构参数,如冠幅、树高、树冠表面积和体积等(de Almeida et al. 2020; Ganz et al. 2019)。
一般情况下,光学遥感(可见光RGB、多光谱、高光谱和热红外)数据的处理包括几何校正和辐射校正两部分。几何校正通常基于GPS和惯性测量单元的数据。地面控制点通常被用于改善几何校正的精度。近期,摄影测量技术,如基于运动的重建方法(SfM)已被用于提取重叠影像中的特征来生成正射影像((GilDocampo et al. 2020; Wallace et al.2016)。软件方面,Agisoft Photoscan和Pix4dmapper等软件已将SfM算法整合到软件之中,用于自动生成正射影像。生成正射影像的同时进行了图像的匹配、拼接、几何校正、亮度和对比度校正等。辐射校正是将图像中的辐射值转为反射率。由于非线性伽马校正效应,可见光和热红外相机很难定标,因此常被用在地物分类和测量温度等不依赖辐射校正的应用方面。多光谱传感器有不同的方法做辐射校正。一种方式是在飞机上安装一个传感器来测量下行辐射并计算实时反射率;另一种方式是在飞行过程中放置一个或多个具有标准已知反射率的地面目标,然后进行经验线性修正(Aasen et al. 2018)。这种方式需要天气晴朗,天空条件稳定,即太阳照度在传感器获取数据期间不能发生很大改变。如果需要长距离飞行,通常建议使用场摄谱仪对地面目标进行并发辐射度测量(Aasen et al. 2018)。这些辐射校正技术同样适用于高光谱传感器。
数据的处理和分析包括基于影像的处理方法(RGB数据)、基于点云的处理方法(RGB和激光雷达数据)以及基于统计模型(多光谱和高光谱数据)和物理模型(多光谱和高光谱数据)的处理方法。RGB影像可以通过易康软件(eCognition)和深度学习方法来识别树木个体(Mu et al. 2018; Petrich et al. 2020)。RGB影像也可以用作森林物候和作物倒伏观测(Berra et al. 2019; Zhang et al. 2020)。RGB拼接数据激光雷达数据都可以用于树木个体的提取(Wallace et al. 2016),但RGB和激光雷达点云数据的获取方式有所差别。激光雷达通过激光扫描可以得到LiDAR点云,RGB的点云则需要通过SfM算法构建。点云数据生成之后,激光雷达和RGB三维点云数据的处理流程就可以通用了。首先利用插值技术对点云进行插值,通过Delaunay三角测量和不规则三角网建立数字地表模型(DSM)和数字地形模型(DTM)。用于测量树木高度的冠层高度模型(CHM)可以通过DSM与DTM相减得到。在CHM或DSM中使用可变的窗口和流域划分等方法对树木个体进行检测(Yin and Wang 2019)或者使用点云分割和图层叠加的方法直接将树木个体从点云中提取出来(Wallace et al. 2016)。树高、冠幅和冠层覆盖度也可以从CHM或点云中得到(GuerraHernandez et al. 2016; Solvin et al.2020)。由于SfM算法得到的点云比LiDAR数据得到的点云稀疏得多,基于RGB影像的点云数据通常需要更多的插值来构建。因此,从LiDAR点云中提取的结构参数通常比从RGB点云中提取的更准确。统计模型通常被用来做分类和回归分析。机器学习算法,如随机森林、支持向量机和卷积神经网络等则在处理无人机遥感数据中被用来执行自动(非监督)分类和半自动(监督)分类(Nguyen et al. 2019)。近年来,基于神经网络的深度学习算法已成为物种分类的有效工具(Lopez-Jimenez et al. 2019; Plesoianu etal. 2020; Zou et al. 2019)。回归方法用于建立目标参数(如叶片叶绿素含量和氮素含量)与光谱数据间的统计学关系。具体方法包括植被指数法、逐步线性回归、偏最小二乘回归等线性回归方法以及随机森林、支持向量机、人工神经网络等非线性回归方法(Padua et al. 2017)。物理模型根据物理规律描述太阳辐射的相互作用和传输,其通用性优于统计模型。但在本文综述的研究中,物理模型的应用较少,仅被用来绘制马铃薯冠层反射率的非均向性(Roosjen et al. 2017)。
3. 无人机遥感在植物生态学中的应用
3.1 无人机遥感在植物生态学中的应用概况
本文综述的 354 个研究案例来自于 43 个国家,主要分布在北美、东亚和西欧,美国和中国是发表研究案例最多的两个国家 (Fig.3) 。研究案例中最早的一个发表于 2005 年的美国,此后,案例的发表数量迅速增加,并在 2016-2019 年达到高峰。本文综述的 354 个研究案例发表于遥感类期刊上的有 215 个,发表于植物科学和生态学期刊上的有 139 个。其它 46 篇综述论文中, 21 篇发表在遥感类期刊上, 25 篇发表在植物科学和生态学类期刊上。发表于遥感类期刊上的综述文章主要关注无人机系统在环境监测中的应用和挑战,发表于植物科学和生态学类期刊的综述文章则主要关注无人机在精确农业和森林管理方面的应用。以往的综述文章多数从遥感的视角撰写,即侧重于植物性状的绘制、测量和监测,而不是回答生物学或生态学领域的科学问题,遥感科学和生态学的关注点存在明显差异。本文涉及的 354 个研究案例绝大多数都使用了 RGB 相机和多光谱相机,集中在群落和生态系统尺度上开展,以森林和农作物为研究对象。因此,在不同尺度,如个体、种群、群落、生态系统和景观尺度上系统梳理无人机遥感在植物生态学中的应用很有必要。
![]()
Figure 3 The percent of case studies in our database conducted in the indicated countries.
3.2 个体到种群尺度:个体识别、生理评估、物种鉴定与分布
无人机遥感数据已广泛应用于单株树冠特征的测量。 Surovy 等人 (2018) 利用点云来估计单株树的高度和位置。 Mu 等 (2018) 测量了单株桃树的冠幅宽度和冠幅投影面积。植物所受的环境压力及其生理变化可以通过可见光和近红外波段反射率的变化来探测。受环境胁迫的植株通常在可见光波段的反射率高于正常植株,而在近红外波段的反射率则低于正常植株。植物的胁迫和生长指标,如叶绿素和叶面积指数,也可通过光谱数据估算。当植物遭受干旱胁迫时,叶片气孔关闭,导致叶片温度升高,这一现象可以通过热成像传感器观测记录 (Leinonen et al. 2006) 。例如, Berni 等人 (2009) 使用热成像来评估桃树的水分胁迫状态,并用于指导精准灌溉。光谱指数,如 NDVI 、 RDVI 、 MTVI1 、 TVI 、 TCARI 、 OSAVI 等,被用来评估橘子树 (ZarcoTejada et al. 2012) 和葡萄树 (Baluja et al. 2012; Romero et al. 2018) 的水分胁迫。高光谱和热成像也被用于量化疾病 ( 黄萎病 ) 对橄榄叶片气孔导度的影响 (Calderón et al. 2013) 。物种分类是无人机遥感在个体尺度最为常见的一种应用。此前,卫星遥感已广泛用于生成全球或国家尺度上的土地覆被图,在地图上植被被划分为森林、草原、沙漠和湿地等 (He et al. 2009) 。 Laliberte 等人 (2011) 对卫星图像的处理和分类过程进行了详细的介绍。然而,由于卫星图像的空间分辨率较低,除非目标物种具有独特的生长形态或物候特征,否则很难识别到种 (Bradley 2014; Huang and Asner 2009) 。相比之下 , 无人机可以获得超高空间分辨率和光谱分辨率的影像,满足植被物种层面的分类需求。 如在一个湖泊生态系统中,利用高分辨率光学图像识别 49 种湖泊植物 / 植被类,准确率可达 95.1% (Husson et al. 2013) 。 将树高与光谱特征、图像纹理特征和高光谱植被指数相结合,无人机识别红树林树种的准确率可达 88% (Cao et al. 2018) 。 利用光学和多光谱图像也可以对稀疏森林的林下草本植物进行物种识别 (Leduc and Knudby 2018; Sanders 2017) 。
物种识别的精度取决于 4 个因素,即数据的空间分辨率、光谱分辨率、生境复杂度以及识别算法的质量。空间分辨率是决定物种识别精度的首要因素 (Ashraf et al. 2010) 。空间分辨率 5cm 依然无法满足草本植物物种鉴定的需求 (Dunford et al. 2009) 。相比之下,空间分辨率达到 1cm 时,湿地生态系统中草本植物的识别精度可达到 93%(Ishihama et al. 2012) 。在 1:50 比例的影像中, Phragmites australis, Typha domingensis 和 Miscanthus sacchariflorus 的种群可以被准确识别 (Kaneko and Nohara 2014) 。因此,低空获取的超高分辨率的无人机遥感影像能够显著改善物种识别的精度 (Cao et al. 2018; Li et al. 2017; Yang etal. 2016; Zarco-Tejada et al. 2012) 。但由于成本较高 (Manfreda et al. 2018; Whitehead andHugenholtz 2014) ,使高光谱无人机遥感系统在物种识别方面的应用受到很大限制 (Ad?o et al. 2017) 。
在复杂的生境中准确识别物种非常具有挑战性,特别是当目标物种个体很小且种间相似度较高时。对北极苔原的一个实例研究表明,带有可见光和红外波段信息的高分辨率影像能识别主要植被类群,但由于种间相似度较高,无法区分物种 (Mora et al. 2015) 。在热带雨林和亚热带森林中,必须综合分析树的性状信息 ( 如冠的大小、冠的状态、冠的轮廓、冠的构型、叶面覆盖度、叶的质地和叶的颜色 ) 才能对冠层优势种进行识别,识别精度仍然有限 (Trichon 2001; Yang et al. 2016) 。综上所述,目前无人机遥感物种识别主要应用于相对简单的生境,如牧场 (Karl et al. 2020; Laliberte et al.2011; Rango et al. 2006) ,湿地 (Chabot and Bird 2013; Doughty and Cavanaugh 2019; Husson et al.2014; Ishihama et al. 2012; Zweig et al. 2015) 、高原灌木沼泽 (Fletcher and Erskine 2012) 和河岸森林 (Husson et al. 2013) 等。尽管城市中物种的栖息地相对简单,但相关的研究却很少,这主要受到了无人机飞行法规的限制。
无人机遥感在植物生态学中应用需要数据处理算法的支撑。除了基于像素和基于对象的算法以外,基于特征的机器学习算法暂露头角并在物种识别方面表现优秀 (Hung et al. 2014; Lary et al. 2016;Plesoianu et al. 2020) 。多源数据的融合算法,如高光谱、 RGB 和激光雷达数据的融合,也可以提高物种分类的精确度 (Cao et al. 2018; Yin and Wang 2019) 。在种群尺度上绘制植物物种的空间分布图是无人机遥感在植物生态学中的一个重要应用领域。例如, Flynn and Chapra(2014) 基于无人机遥感数据绘制了 Cladophora glomerata 的空间分布图; Kalacska et al. (2013) 利用无人机遥感技术提取了加拿大一个沼泽中 Eriophorum vaginatum 的空间分布信息,并评价了其对 CH 4 -C 通量的贡献。也有研究人员通过无人机遥感识别并绘制物种分布图,进而辅助管理杂草和植物入侵 (Abeysinghe et al. 2019; AlvarezTaboada etal. 2017; Hill et al. 2017; Pe?a et al. 2013; Tamouridou et al. 2017) 。
3.3 群落尺度:组成、结构、叶片功能性状、生物多样性和生物量
基于无人机高光谱影像和可见光影像生成的点云信息, Li 等人 (2017) 绘制了香港一处湿地的物种组成图。 Banerjee 等人 (2017) 利用无人机高光谱遥感系统对一个复杂山地沼泽群落中的 5 种植物进行了鉴定和制图,总体分类精度为 88.9% 。 Chisholmryan 等人 (2013) 利用无人机激光雷达系统 ( 飞行高度距离地面 1.5 米 ) 获取树木胸径数据为开展林下调查提供了一种新的途径。
群落的水平结构和垂直结构也可通过无人机遥感手段提取 (Campos-Vargas et al. 2020; Schneider etal. 2019) 。利用无人机可见光影像, Getzin 等人 (2012) 对 10 个温带森林的小林窗 (<5 m 2 ) 的水平格局进行了分析,发现这些传统航空或卫星影像中很难提取到的小林窗占据了林窗的大部分。 Zahawi 等人 (2015) 利用无人机携带激光雷达和可见光相机测量了冠层高度、地上生物量和冠层复杂性,并用来估计果食性鸟类的丰度和森林恢复状况。在冠层闭合度相对较低的地区,无人机光学相机获取的 SfM 点云可以提供丰富的森林结构信息 (Jensen and Mathews 2016; Wallace et al.2016) 。利用无人机遥感也可以估算 LAI 和植被覆盖度来评价群落结构 (Tian et al. 2017; Wang et al. 2019a) 。无人机遥感在森林物候观测方面也正在发挥越来越重要的作用 (Mariano et al. 2016) 。采用无人机携带可见光相机,可以在群落尺度上动态观测林相的变化 (Klosterman et al. 2018) 。
叶片功能性状是指植物的一系列生化和表观特征,如常量营养元素 (N 、 P 、 K 、 Ca 、 Mg 、 S) 、微量矿物质 (B 、 Cu 、 Fe 、 Mn 、 Zn) 和 Al 、纤维素、木质素、糖和淀粉等,已被载人航空遥感广泛估测 (Asner et al. 2014; Schneider et al. 2017;Wang et al. 2018, 2020) 。无人机遥感具有更高的安全性和灵活性,具有采集更高时空分辨率叶片功能特征的潜力,目前已在农田和草原上进行了多项研究 (Table 2) 。
![]()
![]()
利用无人机搭载可见光和高光谱相机可以对亚热带森林或红树林冠层优势种的多样性开展定量研究 (Cao et al. 2018; Yang et al. 2016) 。从理论上讲,基于无人机遥感对冠层树种的识别结果,可以很容易地计算出冠层的物种多样性,但目前无人机遥感影像很少被直接用于计算冠层生物多样性 (Guo et al. 2016b) 。 Saarinen 等人 (2018) 使用基于无人机的摄影测量点云和高光谱成像来监测北方针叶林的枯木数量和物种丰富度。 Getzin 等人 (2012) 使用无人机遥感数据计算了 8 种不同林窗参数,并在景观尺度上探讨了这些林窗参数与林下植物多样间的关系。
无人机遥感可以通过两种方式估算植物生物量 (Man et al. 2014) 。第一种方式是建立无人机遥感数据与生物量间的直接关联,通过 K 近邻分类、多元回归分析、神经网络方法或统计集合方法估算生物量。例如,基于无人机多光谱或高光谱图像计算的植被指数已被广泛用于估算地上生物量、生产力或产量 (Geipel et al. 2014; Getzin et al.2012;Gonzalez-Jaramillo et al. 2019; P?l?nen et al. 2013) 。另一种方式是从无人机遥感影像中提取树木高度、胸径或树冠体积,然后利用异速生长方程来计算生物量 (Bendig et al. 2014; Cunliffe et al. 2016) 。通常用激光雷达的点云数据计算的结果会比用可见光相机生成的点云数据计算的结果更为精确 (Ganz et al. 2019) 。
3.4 生态系统到景观尺度:监测和管理
目前,无人机遥感已被用于探测、监测和控制森林火灾 (Pastor et al. 2011) 。携带可见光相机、红外相机和热成像相机,无人机可以有效追踪火情、预测火势、为救火员提供实时的火况信息 (Bradley and Taylor 2015; Merino et al.2012) 。 Yuan 等人 (2015) 演示了无人机遥感平台上的消防管理系统。除了火灾管理,无人机遥感获取的可见光、热成像、多光谱、高光谱和激光雷达数据可以揭示生态系统的生物和非生物变化 (Valbuena et al. 2020) 。这些无人机遥感数据可以有效帮助生态系统的长期监测和管理。例如, Mancini 等人 (2013) 使用基于 SfM 图像的方法生成了意大利海滩沙丘系统的 DSM;DSM 揭示了滩沙生境的基本特征和复杂性,为今后的生态系统管理提供了基础数据。此外,无人机遥感估测叶面积指数、氮素含量、色素含量和水分胁迫,可为农业精准灌溉和施肥提供依据 (Mathews and Jensen 2013) 。无人机遥感还可以作为一种经济、灵活的工具来监测群落演替 (de Almeida et al. 2020) 、生态恢复 (Knoth et al. 2013; Zahawi et al. 2015) 以及辅助自然资源管理 (Inoue et al. 2014; Shahbazi et al. 2014;Zhang et al. 2016) 。在景观尺度上,无人机遥感主要用于监测栖息地破碎化 (Yi 2016) 、土地覆被变化 (Cruz et al. 2017) 和植被变化 (Nguyen et al. 2019) 等。固定翼无人机由于飞行时间较长,在景观尺度研究中发挥着越来越重要的作用。然而,对于土地覆被或植被监测来说,厘米级精度的图像是有用的,但不是必需的,对于大多数景观尺度的研究来说,卫星遥感数据就足够了 (Komarek 2020) 。考虑到远程控制距离 ( 约 5 km) 、安全性和数据处理难度等因素,无人机遥感的技术优势并不在景观尺度上。因此,在景观尺度上利用无人机遥感进行的生态研究数量十分有限。
4. 挑战和展望
4.1 无人机遥感系统操作方面的挑战
无人机的航空管制是无人机遥感应用于生态研究的主要挑战之一 (Allan et al. 2015; Rango et al. 2009;Werden et al. 2015) 。 St?cker 等人 (2017) 系统梳理了全球的无人机航空管制法规,发现相关法规还不完善,而且地区间存在较大差异,相关法规完全没有跟上民用无人机市场爆发的脚步。很多地区还没有建立专门负责监管民用无人机的管理机构,因此,想获取无人机飞行许可十分困难。
此外,无人机遥感系统的硬件和软件都有待改进。虽然传感器已经变得越来越轻小便携,但仍然很昂贵。例如 , Cubert S185 高光谱相机 (Cubert GmbH ,德国 ) 重量只有 490 克,但价格约为 8.8 万美元。一套无人机激光雷达系统的成本一般约为 12 万 - 17 万美元。值得一提的是,无人机载传感器的价格正在下降。最近,一种集成了 Livox 激光雷达模块和测绘相机的新型无人机激光雷达系统 DJI L1 已正式上市,价格约为 1.2 万美元。虽然其精度仍有待验证,但这一低成本系统将显著提高其认可度,促进激光雷达在植物生态学中的应用。此外,无人机平台与传感器的集成仍需要改进。除可见光相机外,大部分的多光谱、高光谱和热像仪都是独立于无人机平台而制造的,需要与无人机集成并且安装额外的 GPS 模块 ( 如 Cubert S185 高光谱成像仪、 TC640 热像仪 ) 才能获取精确的遥感数据。只有传感器完全集成到无人机上,才能通过飞行控制系统触发传感器。大多数无人机,如大疆 M600 PRO 不允许外部设备共享 GPS 信息。因此,将无人机的 GPS 信息与采集到的高光谱图像联系起来仍然是一个挑战,这加大了生态学者处理无人机遥感数据的难度 (Sha et al. 2018) 。
4.2 影像数据处理和分析方面的挑战
除数据采集外,数据处理与分析也是无人机遥感生态应用的主要瓶颈之一。与传统载人飞机航拍相比,无人机航拍的特点主要表现为飞行高度低并且携带的是小型非航测相机 (Whitehead and Hugenholtz 2014) 。无人机获取的数据质量取决于无人机和相机的类型,其特点往往是图像振幅小、 RGB 真彩色和空间分辨率高。由于气流和风向的影响,无人机的姿态角和航向经常产生偏差,导致照片摆角和重叠度不稳定。此外,消费级的无人机一般携带的都是非测量相机,提高了数据处理的成本。图像边缘的非线性光学畸变 ( 如桶形或枕形畸变 ) 给图像拼接和分析带来了挑战 (Hardin and Jensen 2011) 。无人机数据处理与卫星数据处理有很大的不同,这对传统的遥感数据处理软件提出了新的要求。由于单幅无人机图像覆盖面积小,正射影像的拼接工作量明显高于卫星遥感图像,占用了大部分的处理时间。例如,尼康 D850 拍摄的 2000 幅 RGB 图像 ( 每幅为 8256 × 5504 像素 ) 的拼接,对软件和硬件都是一个巨大的挑战。即使用高性能的计算机,图像拼接也可能需要 15 至 20 小时。 Metashape 和 Pix4d mapper 等图像处理软件可以对高分辨率 RGB 图像进行自动拼接。然而,对于空间分辨率低、空间覆盖度小、纹理较少的多光谱或高光谱图像,如果没有 GPS 数据的情况下进行拼接仍非常有难度。尺度不变特征转换等先进算法已被用于确定多光谱图像之间的拼接匹配点,该方法不受图像缩放和旋转、光照变化和三维相机视图的影响 (Lowe 2004; Ren et al. 2017) 。此外,随着空间和光谱分辨率的提高,图像处理变得相当耗时,因此,开发更有效的算法十分必要。
对于数据分析来说,挑战之一是利用无人机遥感数据估算植物生态参数的模型的通用性。目前植物生态学的遥感研究具有数据依赖性和个案特异性。由于数据收集和处理 ( 特别是辐射校正 ) 的不确定性,以及研究区域、采集日期或植物种类的差异,这些研究提出的预测模型通常难以推广。基于物理方法可以在一定程度上解决模型的通用性问题。这是因为基于物理的方法可以模拟不同情况下植物叶片和冠层内的辐射传输过程 ( 例如不同的叶片生化含量、冠层结构和几何形状 ) 。机器学习方法有潜力捕捉遥感数据和植被参数之间的非线性关系。结合物理模型和机器学习方法,有望构建通用性更好的混合模型。多源遥感数据融合也存在诸多挑战。一种是多源数据的共配准,实现多源图像的几何对齐。在实践中,来自多个传感器的图像往往具有不同的空间分辨率 ( 如 30 厘米 vs . 2 米分辨率 ) 、地理参考精度 ( 如 5 厘米 vs . 1 米几何误差 ) 、光谱特征 ( 如 RGB vs . 近红外波段 ) 、采集日期 ( 如生长期早期 vs . 生长期后期 ) 和观测几何 ( 如后向散射角 vs . 前向散射角 ) 。这些因素极大地影响了多源图像之间关联点的搜索,进而又决定了共配准精度。对于具有大量图像的无人机遥感数据,往往需要一个自动共配准流程。最近,在这一领域取得了一些进展。例如, Scheffler 等人 (2017) 开发了开源 Python 包 “AROSICS”( 自动化和稳定的开源图像共配准软件 ) ,实现多传感器卫星图像的自动共配准。然而,此包对于通常具有较高空间分辨率的无人机图像的适用性仍然需要测试。
另一个挑战是如何整合来自多源遥感数据的信息。如上所述,多源遥感数据提供了关于地物的不同信息。例如,多光谱数据可以用来推断植物的生物物理参数 ( 如 LAI 和植被覆盖度百分比 ) ,高光谱数据推断植物的生化或生理参数 ( 如叶片叶绿素和氮含量 ) , LiDAR 数据推断植物的结构参数 ( 如植物高度和林窗率 ) 。尽管大多数研究表明了在分析中加入更多信息的好处,但对融合多源信息的框架还没有达成共识。最近的一些研究表明,机器学习算法 ( 如深度卷积神经网络 ) 具有在不同层次上集成多源信息的能力 (Yao et al. 2019 ) 。
4.3 物种自动识别方面的挑战
物种分类是评价植物群落组成、结构和生物多样性等特性的基础。目前多数基于无人机遥感数据的物种分类都需要人工参与和解译。传统方法的分类精度取决于许多因素,包括传感器类型、无人机平台与传感器的集成度、图像分辨率、栖息地复杂性、操作经验以及生态学家和技术专家之间的默契度。随着大数据分析和机器学习技术,特别是用于图像处理的共同进化神经网络算法 (Brodrick et al. 2019 ) ,通过无人机遥感自动识别物种的可行性正变得越来越高 (Jin et al. 2018; Sandino et al. 2018 ) 。如果用于训练的数据集足够 “ 大 ” ,机器学习理论上应该会产生令人满意的分类结果。众包 (Crowdsourcing ) ,即将任务或数据收集工作外包给一大批非业内人员,已被证明是大型数据库建设的一种有效方法 (Minet et al. 2017 ) 。
4.4 天空地一体化监测系统
无人机遥感填补了地面观测与载人飞机和卫星遥感之间的空白,使跨尺度回答某些基础的生态学问题成为可能。例如, D Oleireoltmanns 等人 (2012 ) 使用无人机获取了摩洛哥 70 米和 400 米高度的土壤侵蚀区域的可见光图像,并在局域尺度上分析了侵蚀沟的分布、体积和动态变化,然后结合无人机遥感和卫星影像,对采样点和整个区域的土壤侵蚀机理进行了深入探讨。多尺度抽样方法也可用于监测不同尺度的生物多样性变化 (Gonzalez etal. 2020; Guo et al. 2016a ) 并有助于发现生物多样性 - 生态系统跨时空功能关系的形式和驱动力 (Williams et al. 2021 ) 。 在此前提下,天空地一体化监测系统对研究生态稳定性的尺度效应也有一定的借鉴意义 (Wang et al. 2017) 。 天空地一体化 研究框架已被用于精准农业 (Matese et al. 2015; Zecha et al. 2013 ) 和土地管理 (Browning et al. 2016 ) 等方面。 大多数卫星图像可供公众研究使用。 许多平台,如谷歌地球引擎 (GEE) , EarthServer, Docker 和 耦合模型相互比较项目 (CMIP ) ,越来越多地用于生态和环境研究。 基于云处理能力和远程地理数据库访问能力,像 Landsat 和 MODIS 等数据,无需下载到本地即可完成数据处理 (Baumann et al. 2015; Gorelick et al. 2017;Liang et al. 2020 ) 。 无人机提供的高分辨率图像可作为地面验证数据来训练和验证这些云平台的图像处 理结果,从而促进天空地一体化的多尺度生态监测系统的构建。
4.5 从描述生态学现象到解决生态学问题
本文综述的大多案例都发表在遥感领域的期刊上,侧重于遥感技术而不是生态学问题。只有少数论文集中在回答一些基本的生态学问题,如生物之间的关系和生物与环境的关系 (Rissanen et al. 2019; Waite et al. 2019;Zhang et al. 2016; Zhao et al. 2020) 。以往的研究大多集中在对生态现象的描述,即利用无人机遥感获取生态参数,但这些研究很少利用这些参数来回答真正的生态学问题。需要将无人机遥感技术的发展与植物生态学面临的挑战结合起来,用于回答基本的生态学问题 (Santos et al. 2018) 。无人机遥感通过解决不同生态尺度下的经典生态问题,为植物生态学开辟了新的可能性。生态学家和遥感专家应该通力合作,共同探讨无人机遥感系统应该如何收集和分析数据,以便更为深入地理解生态过程,如光合作用、养分循环、种间关系和群落演替等 (Fig.4) 。在个体尺度上,树冠图谱可以与环境变量联系起来,探索物种和种间关系的适应性进化,如冠形和环境间的关系以及物种之间的关系。在群落尺度上,传统的局限于冠层内和林下层的测量数据可以与无人机获取的冠表层参数相结合,研究群落的组成和结构,包括但不限于冠层结构、植物功能性状和多样性。在生态系统尺度上,无人机遥感获取的地图或参数可以与通量塔测量相结合,以研究生态系统过程和功能,特别是生态系统干扰 (Table 2) 。
![]()
Figure 4 The connection between UAV remote sensing and ecology. The contents in blue boxes belong to remote sensing science and technology and those in green boxes belong to ecology. The boxes with half blue and half green represent the interdisciplinary parts. UAV remote sensing is suitable for answering ecological questions derived at individual, population, community, ecosystem and landscape scales. In addition to classical ecological questions, there are some novel questions need to be answered, for instance, the relationship between tree crown structure and species competition; the relationship between canopy biochemical feature and environmental change.
4.6 亟需可以深入挖掘无人机遥感数据价值的新方法
许多针对传感器而开发的工具或产品在促进生态研究方面发挥了巨大的作用。这些工具或产品多源自航天和航空遥感数据,一般侧重于解决景观、区域和全球尺度的问题。随着无人机遥感技术的发展,具有超高空间分辨率的数据和产品已可用于从个体到生态系统的生态研究。从物种鉴定到群落的生物物理和生物化学结构检测,新的研究方向对遥感工具或产品的开发提出了新的挑战。无人机为生态学研究人员带来了前所未见的,如此清晰的生态系统 “ 鸟瞰图 ” 。如果这些数据只是简单地用于反演可以在地面上收集的传统参数,如高度、胸径或物种多样性,并不能充分体现这些数据的真正价值。无人机遥感数据包括冠层的颜色、阴影、密度和三维属性,如何以回答生态学问题为目标对这些数据进行量化和分析仍然是一个挑战。为了更好地利用无人机遥感数据,已有研究者尝试从冠层化学组分结构和冠层林窗几何特征等方面理解群落结构 (Asner et al. 2014; Getzin et al. 2014) 。深入理解冠层表面的不规则性和群落的异质性,需要从这些无人机遥感数据中提取更有生态意义的新参数。在传统物种多样性评价指标的基础上,还需要开发新的指标,包括颜色多样性、光谱多样性、生物化学多样性和冠层结构多样性等。此外,生态学家可以利用无人机遥感进一步了解不同物种竞争强度下冠层和群落尺度上的许多有趣的生态现象,如树冠形状的适应过程。无人机遥感数据的采集与处理对大多数生态学者来说是一项新的、复杂的工作,需要生态学者与遥感专家加强合作,推动无人机在植物生态学领域的应用,解决新老生态问题。
5. 结论
无人机遥感弥合了地面观测、传统载人飞行器和卫星遥感在尺度和分辨率上的差距。民用无人机技术的成熟是无人机生态应用的起源, SfM 摄影测量技术的出现促进了无人机的生态应用。植被的测绘、测量和监测是无人机遥感在植物生态学领域的三大主要应用。从物种尺度到种群尺度,生理评估、物种识别和种群分布制图是文献报道最多的无人机应用。无人机遥感生理评估为生态系统的精准管理提供了依据。但在生态应用方面,还需要进一步将遥感数据与生态过程相结合。物种鉴定和种群分布图绘制是生物多样性研究和许多生态过程研究的基础。将大数据技术与机器学习方法相结合,可以提高复杂生境物种识别的准确性。在群落尺度上,群落结构、多样性和生物量是生态学者关注的主要问题,但无人机在这些领域的应用仍处于初级阶段。在生态系统尺度下,生态系统监测与管理是无人机应用的主要研究领域。无人机遥感在扑灭森林火灾、监测生态系统恢复和提供精确作物管理方面发挥了重要作用。未来无人机遥感在植物生态领域的应用方向在于部署天空地一体化的多尺度遥感系统。目前无人机遥感的大部分生态应用都是针对技术的改进,而不是解决基本的生态问题。生态学者和遥感专家需要密切合作,才能提升无人机遥感在解决生态问题方面的能力。