HyperTunnel集群施工机器人最新进展公布——隧道施工技术新方向
 +关注
只看楼主
+关注
只看楼主
新兴隧道技术公司HyperTunnel的集群机器人快速施工隧道技术自公布以来,已被不少人赞誉为未来隧道施工技术的发展方向;然而,也有很多人质疑这种结合了水平定向钻、集群机器人及多项智能化技术的施工技术在实际运用过程中可靠性。
近期,HyperTunnel公司公布了他们从“个体机器人到群体机器人”的进展,并宣布第一批集群机器人将在2024年内投入隧道施工现场使用。本期,小编就来带大家一起了解一下,这项备受关注的新技术到底进展如何!
HyperTunnel技术的核心是利用集群机器人在地层中先建好衬砌,然后再将衬砌内部的土体挖空,以形成隧道空间。HyperTunnel工法流程分为三步:
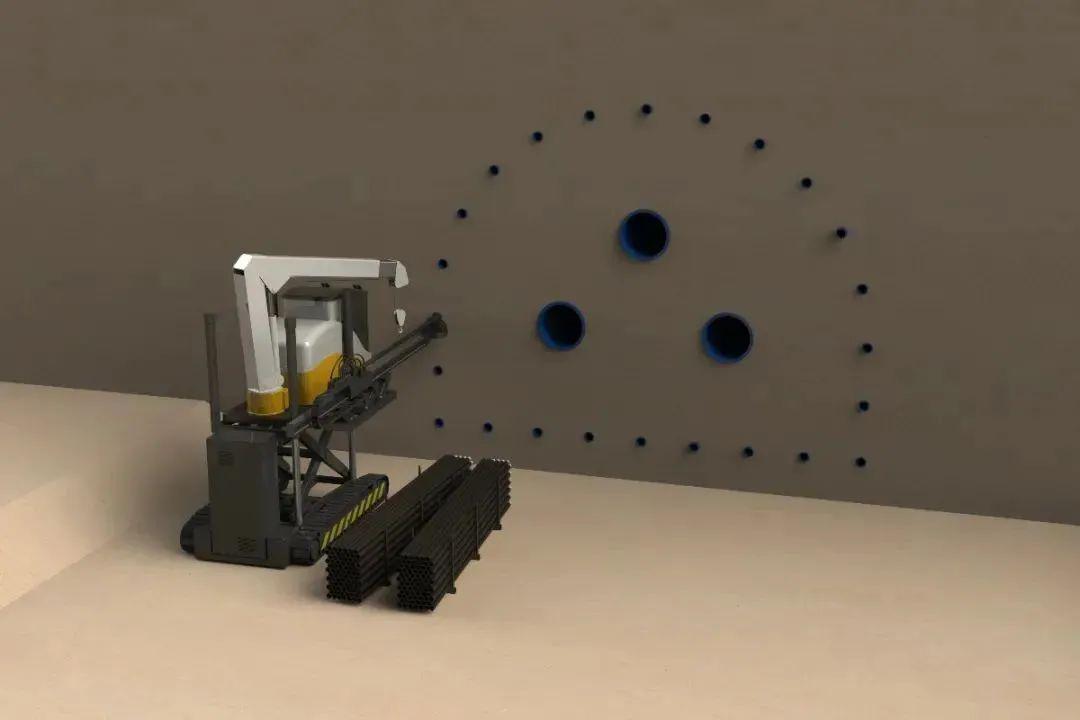
■ 第一步:建设原始导向管和施工导向管
利用水平定向钻机在隧道断面中心钻出数个原始导向管,进行初步勘探,并按照隧道断面的轮廓和隧道路线钻出一系列施工导向管。然后将施工机器人放入导向管内。
被放置入导向管内的施工机器人(原型)
■ 第二步:机器人施工
机器人进入施工导向管后,将通过微型钻头从施工导向管内对周围的地层进行开挖并注入化学材料,以形成隧道衬砌。
机器人整体运作方式
机器人开挖过程
■ 第三步:去除壳内土体
隧道衬砌成型后,将位于断面中心的原视导向管扩径,以促使壳内的土体向内“塌陷”,然后通过设备将弃土清除,后续按照隧道要求安装内衬。
弃土清除设备
验证施工效果
HyperTunnel的集群机器人快速隧道施工技术一经公布便饱受关注,但也有不少人对这一技术的施工速度和成本效益提出了质疑。
面对
质疑,HyperTunnel公开了他们近期的研发进展,并对施工速度和成本效益方面的担忧给出了解决方案。
HyperTunnel此前已经展示过施工机器人的几项核心功能,包括导向管内定位,开挖机械臂,双机并行等,尽管这些展示证明了机器人施工的可行性,但对其施工速度和成本效益方面的质疑依旧存在。
双机管道内并行功能
而在最新的展示中,hyperTunnel测试了一个由50台机器人组成的原型集群,这是一种与众不同的快速原型设计:
传统上,原型通常是一次性生产,成本较高,
工程师们通常会在后续再考虑如何量产和降低成本。
然而,由于hyperTunnel工法的“群体”性质,项目团队必须在原型设计阶段,就基于群体进行开发和测试。
实验室内的原型集群
原型集群的设计重点是保持机器人结构简单,并尽可能降低其成本和生产时间。集群中的个体机器人存在“可牺牲性”,可靠性将更多地从集群整体的角度考虑。
hyperRam型机器人
以目前正在进行寿命测试的HyperRam型机器人为例:该机器人的任务是在导向管上安装后续施工所需的接口和配件。
在寿命测试中,这台HyperRam型机器人在完成3000个安装循环后,开始出现轻微磨损。hyperTunnel团队认为,从集群整体和新机器人生产速度的角度来看,这样的可靠性是可以接受的。
钻孔机器人
目前HyperTunnel共进行了4种型号机器人的研发,分别是用于测量的HyperDAR型机器人,用于安装接口和配件的HyperRam型机器人,用于注浆和土体改良的HyperDeploy型机器人和用于构建衬砌的HyperCast型机器人。
其中HyperCast型机器人目前尚未公布,但预计将于2025年发布。所有的机器人都采用电池供电,利用无线充电技术供能。
自动化机械臂实物展示
HyperTunnel技术的核心不仅是机器人集群,还有集群的控制系统。负责操控成百上千台机器人的操作系统本身就非常复杂且昂贵,而投入商业化后,各类不同的现场环境可能会对操作系统和通信网络提出不同的需求,进而可能会耗费更多的成本和时间。
设计中的可视化控制界面
为应对这一挑战,hyperTunnel设置了集群测试实验室,允许工程团队针对不同现场环境进行“彩排”,提前对操作系统进行微调,并测试网络环境。
现场测试
尽管许多大型建筑行业企业和投资者都支持HyperTunnel系统,但这项技术距离整体投入商业化运用还有很长的距离。
有鉴于此,
HyperTunnel计划将他们机器人先行运用在已有隧道的监测和修复工作中,
并在此过程中,积累实地运用的经验。
2023年10月,HyperTunnel机器人获得了英国铁路部门的许可,将应用于轨交隧道的维修和监控作业中。
本文内容整理自网络
供稿、编辑&排版:GDY
审校:Jacob
免费打赏
APP内打开