
作者:李占伟 杨勇 江洋 李婷 耿海霞 北京市建筑设计研究院有限公司 摘 要
作者:李占伟 杨勇 江洋 李婷 耿海霞
北京市建筑设计研究院有限公司
摘 要
北京信息科技大学图书馆中庭幕墙高25 m,两端粗中间细,形似喇叭,结构形式为单层钢结构网壳,构件采用矩形钢管。由于单层网壳结构非常纤薄,需要重点关注其稳定设计。
以钢结构网壳的稳定问题为切入点,以全流程设计为主线,重点从方案比选、精准建模、二阶直接分析法的应用、边界条件等影响结构稳定的几个主要方面展开论述:1)通过改变环向约束构件的数量,将中庭钢结构分为3种网壳模型进行对比,并从中选出最优的结构模型。2)矩形管网壳结构的建模需要构建两个主轴的其中一个垂直于网壳曲面,常规的解决办法是参数化建模,不易操作。从实用角度出发,给出了用MIDAS结合RHINO软件对矩形管结构精准建模的简化方法。3)应用二阶直接分析法进行结构设计,需要模拟包含结构整体缺陷 P - Δ 0 和构件缺陷 P - δ 0 。整体缺陷 P - Δ 0 的模拟可以采用将结构形态按第1阶屈曲模态调整的方法,一般通用有限元软件均很容易做到,构件缺陷可以用半个正弦波模拟,矩形管构件的缺陷需要指定方向,目前一般软件尚不能自动考虑构件缺陷形态和方向,这是应用二阶直接分析法的难点之一。为解决该问题,可以采用EXCEL对MIDAS数据文件进行处理。4)单层网壳结构一般对边界条件的自由度要求较高,采用已获得国家专利授权的一种新型网壳结构支座,该支座实现了约束水平位移和灵活释放竖向位移的效果。
通过分析得到:1)由于环向箍的存在,三角形网格方案整体性最好。2)矩形管精准建模方法简单实用,便于设计人员操作。3)构件缺陷 P - δ 0 建模方法,解决了现阶段软件不能自动实现构件缺陷建模的难点。4)新型专利支座很好地满足了模型边界条件对自由度的释放和约束的要求。
1 项目概况
北京信息科技大学图书馆平面尺寸为72 m×72 m,结构屋面高度30 m,地上6层,主体为钢筋混凝土框架剪力墙结构,内含中庭,为二层以上通高25 m钢结构网壳,结构平面呈外方内圆。如图1所示,网壳结构立面呈细腰形圆筒状,上大下小,形似花瓶上端直径34.8 m,下端直径17.4 m。网壳底部支座落在首层顶梁上,顶部与屋面混凝土结构连接。
经综合考虑网壳整体稳定、主体屋面承载能力及总体造价等因素,顶部创新性地采用了约束网壳水平位移释放竖向位移的连接方法。此外,本文就稳定设计中的结构方案比选、矩形管网壳精准建模方法、二阶直接分析法应用等方面进行了论述,其中关于二阶直接分析法中构件缺陷的模拟问题,国内通用有限元软件尚不能很好解决,本文利用Excel对模型数据进行处理,能够很好地实现构件各方向缺陷建模,解决了二阶直接分析法应用的模型问题。
2 建筑结构方案比选
网壳结构多构件外露,建筑即结构,结构即建筑,建筑与结构高度统一。因此,为了达到合理的结构方案和良好的建筑效果,首先要从结构角度进行合理的方案对比,给出结构建议。
钢材采用Q355B,结构矩形管采用铸钢节点,软件中结构自重荷载系数取1.2,玻璃幕墙荷载1 kN/m 2 ,雪荷载0.4 kN/m 2 ,由于结构周围封闭,不考虑风荷载作用。
图1a为方案1模型,该模型以幕墙三角形玻璃的三条边为依据构成结构基本单元,组成网壳结构;图1b为方案1第1阶屈曲模态;图1c、1d为方案2及其第1阶屈曲模态,该方案是在方案1基础上每隔1排去掉1排横向杆件;图1e、1f为方案3及其第1阶屈曲模态,该方案是在方案1基础上去掉中间所有横向杆件。除横向杆件数量不同外,3个方案的模型数据、荷载条件等均相同。
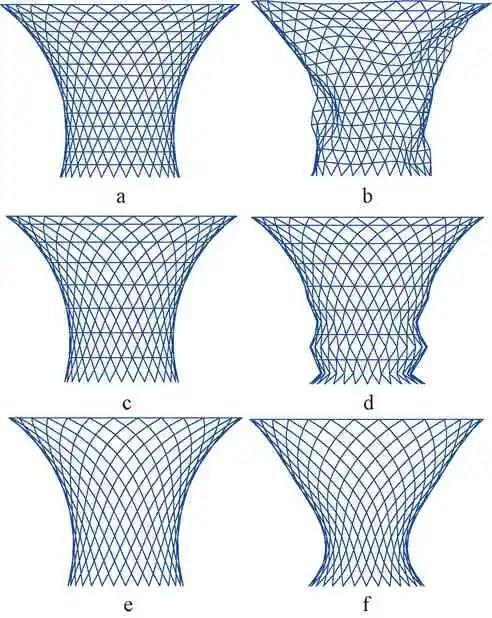
a—方案1模型;b—方案1第1阶屈曲模态;c—方案2模型;d—方案2第1阶屈曲模态;e—方案3模型;f—方案3第1阶屈曲模态。
图1 各方案模型及屈曲模态
由图1可知,方案1第1阶屈曲模态表现为棋盘形,线性屈曲荷载系数为60,失稳发生在某个点,整体性相对较好;方案2由于失去部分环向箍的约束作用,第1阶屈曲模态表现为波浪形,线性屈曲荷载系数36,失稳共同发生在多个点,整体性相对较差;方案3由于失去所有环向箍的约束作用,其第1阶屈曲模态表现为单波曲线形,线性屈曲荷载系数6.7,失稳发生在一片区域,整体性为三者最差。
相较之下,由于环向箍的存在,方案1整体性最好,表现为:1)曲线型圆筒网壳,平面360°对称;2)环向箍可限制整体内收或膨胀;3)环向箍与斜向杆件共同组成有限个三角形单元,各单元角点相连,可保证竖向力和水平力向支座传递的有效性。
综合以上各方案的结构稳定表现以及建筑玻璃幕墙效果,本项目最终选用方案1。
3 矩形管网壳精准建模
矩形管网壳模型特点
相比于圆管网壳,矩形管网壳更能体现其结构棱角美。矩形管长边垂直于网壳曲面布置,符合网壳结构面外计算长度约大于面内计算长度1.6倍的特点,且从正面看到的是矩形管窄边,建筑总体呈现的是其纤细的一面,建筑与结构高度统一。但矩形管如何按曲面准确建模,是面临的第一个难题。
矩形管网壳精准建模方法
矩形管网壳按曲面准确建模,现阶段用单一通用有限元软件尚难以实现,一般均借助建模软件编程予以实现,但这种方法普及率低,且每个不同工程均要独立编程,不适宜推广。区别于以上方法,本项目采用更加简单易行的办法解决此问题。
本项目以通用有限元软件MIDAS为主,并辅以RHINO软件得到MIDAS建模所需方向向量,无需编程即可完成精准建模。操作步骤:1)在MIDAS中建立初步模型,得到构件的定位点。2)将MIDAS模型数据导入RHINO,在RHINO中利用构件定位点拟合曲面,并以此曲面为基准面得到通过杆件中点的曲面法向量辅助线。控制曲面及法向量辅助线均可方便地通过RHINO自带功能得到,无需编程。本项目共31根辅助线,RHINO基准面及控制线如图2所示。3)将第2步得到的法向量辅助线及模型控制点导回MIDAS,利用法向量辅助线作为参考向量建立单元,得到矩形管网壳精准模型。由MIDAS建立普通模型节点如图3a所示,矩形管精准模型如图3b所示。
图2 RHINO控制曲面及法向量辅助线
a—一般建模法节点;b—矩形管精准建模节点。
图3 模型节点对比
4 二阶直接分析法在本项目的应用
自18世纪中叶欧拉公式问世以来,钢结构稳定计算得到了空前的发展,计算长度系数法广泛应用于钢结构稳定设计中,其具有概念清晰,应用简单的特点。但实际应用当中计算长度系数往往受各种因素的影响而不易准确计算,尤其是空间复杂结构,单靠软件不能准确计算构件的计算长度,往往需要人工指定,且概念设计成分较多,误差较大,严重影响结构的经济性和安全性。
得益于现代计算机软件技术的大发展,近些年来各国标准规范均不同程度地纳入了二阶直接分析方法。GB 50017—2017《钢结构设计标准》中加入了二阶直接分析法,为我国复杂钢结构的稳定计算提供了全新的解决办法和依据。本部分将对二阶直接分析法在稳定问题上的应用做论述,并指导设计。
二阶直接分析法的优势和关键点
稳定问题本质是二阶问题,合理的分析方法是二阶分析法。
4.1.1 二阶直接分析法与传统计算长度法对比
一般采用式(1)对结构构件进行验算:
σ < f
(1)
式中: σ 为外荷载引起的内应力,MPa; f 为容许应力,MPa。
传统计算长度系数法从公式右端出发,致力于求容许应力 f 。其根源是欧拉公式,在理想情况下,临界荷载(即容许应力)很容易得到,但实际结构复杂多样,导致计算长度难以准确求出,而 f 的计算较多地取决于计算长度系数,以至于容许应力f的准确性不容易保证。
而二阶直接分析法从公式左端出发,致力于求内应力 σ ,从根源上解决问题。模型中考虑整体缺陷和构件缺陷,并采用适当的计算方法,得到的应力就是实际的应力,可直接与材料强度设计值比较进行验算。二阶直接分析流程如图4所示。
图4 二阶直接分析应用流程
4.1.2 二阶直接分析法应用的关键点
1)整体缺陷 P - Δ 0 和构件缺陷 P - δ 0 的模拟。
整体缺陷 P - Δ 0 的模拟可以采用将结构形态按第1阶屈曲模态调整的方法,缺陷最大值采用结构跨度的1/200~1/500,这一点可以很容易地通过软件按第一阶屈曲模态方向向量移动各节点而得到。
构件缺陷如图5所示,构件缺陷形态可以按构件长度的半个正弦波模拟,一个杆件宜分为4个单元以上,构件缺陷的幅值可以依据构件不同类别而取用构件长度的1/250~1/400。
注: ![]()
图5 构件缺陷 P - δ 0
构件缺陷的方向对结构的影响是另一个需要讨论的问题。对矩形管需要分别考虑两个主轴方向。但现阶段软件尚不能按正弦波自动考虑构件缺陷形态和缺陷方向,这是应用二阶直接分析法的难点之一。鉴于此,本项目采用EXCEL对MIDAS数据文件进行处理的方法解决构件缺陷的模拟问题。
2) P - Δ 效应和 P - δ 效应的实现。
二阶分析法需要将平衡方程建立在变形后,进行荷载-位移全过程分析,这就需要软件支持基于大位移格式的几何非线性分析法。有了合适的分析方法,配合考虑了整体缺陷 P - Δ 0 和构件缺陷 P - δ 0 的模型,便可得到整体二阶效应 P - Δ 和构件二阶效应 P - δ 。这一点在通用有限元软件中均可实现。
模拟构件缺陷 P - δ 0
按半个正弦波模拟构件缺陷 P - δ 0 ,需要将模型中构件细分为多个单元,并按指定方向、指定半个正弦波移动各单元控制节点,同时保持原控制节点不变、单元截面方向不变。下面以EXCEL和MIDAS为主要工具论述构件缺陷 P - δ 0 的模型处理方法。
1)确定构件缺陷函数 ![]() 的幅值和方向。 三角函数幅值可按构件截面类型取用构件长度的1/250~1/400。 关于构件初始缺陷半个正弦波的弯曲方向,GB 50017—2017《钢结构设计标准》没有给出明确意见。 舒赣平等认为构件缺陷的方向应与弯矩引起的挠曲方向一致。 陈骥按小挠度理论分析了初始缺陷对构件的影响,给出了含初始缺陷受压构件的极限应力曲线(图6),并指出极限应力 σ u 与构件的截面形式、长细比、弯曲方向有关。 鉴于此,本文分别按矩形构件的两个主轴方向建立构件初始缺陷模型,以考虑缺陷方向对构件的影响。
的幅值和方向。 三角函数幅值可按构件截面类型取用构件长度的1/250~1/400。 关于构件初始缺陷半个正弦波的弯曲方向,GB 50017—2017《钢结构设计标准》没有给出明确意见。 舒赣平等认为构件缺陷的方向应与弯矩引起的挠曲方向一致。 陈骥按小挠度理论分析了初始缺陷对构件的影响,给出了含初始缺陷受压构件的极限应力曲线(图6),并指出极限应力 σ u 与构件的截面形式、长细比、弯曲方向有关。 鉴于此,本文分别按矩形构件的两个主轴方向建立构件初始缺陷模型,以考虑缺陷方向对构件的影响。
图6 极限应力曲线
2)求单元截面主轴方向向量。对矩形等截面各向特性不同的构件,为了便于对比分析,需要分别给出各主轴方向的构件缺陷。MIDAS软件以 β 角定义构件方向,并没有给出单元坐标轴方向向量,为此需要通过模型中单元 β 角等已知数据推导出单元主轴方向向量,并以此指导构件缺陷方向的模拟。
单元的 β 角为从单元 x 轴正向向原点看去,绕 x 轴将 xZ ′平面转到 xz 平面所需的角度,逆时针为正,顺时针为负,如图7所示。 X ′ Y ′ Z ′分别为通过单元中点平行于整体坐标轴 XYZ 的轴, xyz 为通过单元中点的单元局部坐标轴,均服从右手螺旋法则。
图7 β 角定义
原单元和节点坐标等初始信息可从原模型中提取,单元 x 轴方向向量可方便地由已知节点坐标得到,可与 Z ′方向向量、单元 β 角一同作为已知条件。定义 n 为单元坐标轴 x 向量与整体坐标 Z ′向量的法向量, Z ′ xn 服从右手螺旋法则, n = Z ′× x 。那么, n 与 y 的夹角就是单元 β 角。
综上,可列出方程式(2)、(3):
x · y =0
(2)
(3)
y 向量包含三个未知数,可将三个未知数中的任意一个指定为1,从而通过简化上述方程组可得到一元二次方程。其解有两个,需要结合实际情况进行判断,舍弃一个错误的解,方可得到单元坐标轴 y 向量。再通过 z = x × y 可得到单元坐标轴 z 向量。
3)反求细分单元 β 角完成 P - δ 0 建模。由于MIDAS单元 β 角的定义,按上述向量移动节点后,单元变得扭曲(图8a)。为此,需要按更新后的细分单元 x 向量结合上述所求原单元 y 向量由式(3)反求各细分单元 β 角。更新 β 角后的细分单元如图8b所示。
a—反求 β 角前单元;b—反求 β 角后单元。
图8 模型单元角度
将按上述流程处理后的节点和单元数据导回MIDAS,完成构件缺陷的建模。图9a为沿着构件局部坐标轴 z 向(面外)建立放大60倍构件缺陷的整体模型,图9b为沿着构件局部坐标轴 y 向(面内)建立放大60倍构件缺陷的整体模型。
a—面外构件缺陷放大模型;b—面内构件缺陷放大模型。
图9 含构件缺陷整体模型
二阶直接分析法计算荷载系数
本项目稳定计算采用GB 50017—2017中的弹性二阶直接分析法。由于模型中已经考虑了整体缺陷和构件缺陷,故模型中构件计算长度系数取1,结果也不需要进行基于计算长度的稳定计算。
结构整体缺陷 P - Δ 0 由软件通过结构第一阶屈曲模态得到,构件缺陷 P - δ 0 按本文方法进行建模。为了模拟构件缺陷每个构件细分为四个单元,缺陷幅值按c类截面取为构件长度的1/300。非线性分析采用位移控制法。分别得到了未考虑构件缺陷的二阶 P - Δ 0 - Δ 几何非线性弹性稳定结果,以及分别按构件截面的两个主轴考虑构件缺陷的二阶 P - Δ 0- δ 0 - Δ - δ 几何非线性弹性稳定结果(图10)。
图10 荷载系数-位移全过程曲线
从图10可以看出:1)含构件缺陷时荷载系数低于无构件缺陷时荷载系数;2)面内构件缺陷时(即单元 y 向含有缺陷时)荷载系数略低于面外构件缺陷时(即单元 z 向含有缺陷时)荷载系数。
5 网壳支座发明创新
边界条件的不同将影响结构稳定计算的结果,边界条件的构造与计算假定的吻合度也将影响结果的准确性。为此,针对本项目网壳结构的特点,制定了明确的边界条件,发明了新型支座,以保证实际支座能够很好地吻合模型边界条件。
新型支座
该网壳底部固定,顶部与另一混凝土结构相连。一方面该网壳竖向温度变形明显,为了减小温度变形带来的影响;另一方面,为了释放二者竖向荷载的传递依赖关系。该网壳结构除底部固定外,顶部各点需要在约束水平位移的同时释放竖向位移。为此,特为该网壳顶部与另一混凝土结构的相连构造设计了新型支座。如图11所示,该发明充分利用销轴自由转动的特点,用耳板、连接杆件等对其加以组合,达到约束水平位移、释放竖向位移目的的同时,也保证了其在工作中不会发生卡顿。
图11 网壳顶部支座
支座受力分析
如图12a所示,原始状态为A、C、B 3个点均在 xy 平面内,B、C设为固定端,AB、AC为两个支座连接杆件,两端铰接,两者共同工作。根据对称性,现以AC杆为例分析以下3种受力状态。
1)如图12b所示,当A点受力向下移动距离 H 到A′,AC杆长度增加Δ L ,同时AC杆会产生相应内力。就本工程来讲,当温度变化30 ℃,网壳升高或降低18 mm,AC杆长度增加0.16 mm。
2)如图12b所示,当A点受力绕C点移动到A″,AC杆长度不变,但从平面上可以看出,原∠BAC变为∠BA″C,由于角度改变,连杆AC、AB以及相应耳板发生面外变形。就本工程来讲,当温度变化30 ℃,网壳升高或降低18 mm,AC杆在平面上发生转角∠ACA″=0.008°,该角度变化可以被耳板间隙吸收,耳板和连杆因该变形而产生的内力可以忽略。
a—支座平面受力简图;b—连杆受力状态简图。
图12 支座受力分析
3)实际工程中,根据A点结构以及连杆AB、AC等相对刚度关系以及荷载工况的变化,支座变形实际兼有上述两种情况,连接杆往往处于杆件轴向变形与面外变形共存状态,而当A点竖向位移较小时,面外变形可以忽略,轴向变形可以由连杆承担。
支座设计建议
从结构上看,该支座是以连杆结合销轴组合形成支座,实际应用中可将该支座的杆件建到模型中,从整体上把握支座受力状态。分析并合理控制支座竖向变形,以保证该支座实现预定效果。
6 结 论
本文主要从全流程设计中的方案比选、精准建模、二阶直接分析、边界条件四个方面对矩形钢管网壳结构展开论述,得到以下结论:
1)方案比选。环向箍可限制网壳整体内收或膨胀,保障竖向力和水平力有效地向支座传递。
2)精准建模。矩形管网壳建模难度较大,本文利用RHINO软件得到的曲面法向量辅助线方法可以快速准确建模,为下一步分析工作提供了模型保障。
3)二阶直接分析法的应用。a.以整体缺陷和构件缺陷的建模为切入点,系统讨论了几何非线性弹性二阶直接分析法的应用关键点。b.创新性地提出了构件缺陷的建模方法,解决了现阶段软件不能自动实现构件缺陷建模的难点。c.稳定分析结果表明,面内构件缺陷时荷载系数略低于面外构件缺陷时的荷载系数。
4)网壳支座发明创新。该支座具有约束水平位移、释放竖向位移的效果,分析结果表明,当竖向位移较小时,本支座可以较好地实现预定约束目标。