Autodesk Navisworks 2019,可以实时在场景中漫游。 本节内容 导航场景 在 Autodesk Navisworks 中,有各种用于导航场景的选项。 用户可以使用导航栏上的导航工具(例如平移和缩放)直接操纵自己在“场景视图”中的位置。还可以使用随光标移动的 SteeringWheels®,并且通过将许多常用的导航工具组合到一个界面中可以节省时间。
Autodesk Navisworks 2019,可以实时在场景中漫游。
本节内容
导航场景
在 Autodesk Navisworks 中,有各种用于导航场景的选项。
用户可以使用导航栏上的导航工具(例如平移和缩放)直接操纵自己在“场景视图”中的位置。还可以使用随光标移动的 SteeringWheels®,并且通过将许多常用的导航工具组合到一个界面中可以节省时间。
可以使用 ViewCube®,这是一种三维导航工具,通过该工具,通过单击立方体上的预定义区域可以重新设置模型视图的方向。例如,单击 ViewCube 的“前”将旋转视图,直到相机面向场景的前面为止。还可以单击 ViewCube 并进行拖动以自由地旋转视图。ViewCube 在二维工作空间中不可用。
提示: 可以使用 3Dconnexion 三维鼠标作为替代鼠标进行导航,并更改模型在三维工作空间中的方向。用户可以使用二维模式在二维工作空间中进行导航。
对三维模型进行导航时,可以使用“视点”选项卡→ “导航”面板上的真实效果工具来控制导航的速度和真实效果。因此,举个示例来说,用户可以走下楼梯或依随地形而走动,蹲伏在对象之下,使用替身来表示在三维模型中的自己。真实效果工具在二维工作空间中不可用。
创建导航的动画
在 Autodesk Navisworks 中进行导航时,可以录制视点动画,然后回放。有关详细信息,请参见“回放动画”录制和播放动画 播放动画。
使用轴网和标高
在 Autodesk Navisworks 中,轴网和标高可以帮助您浏览场景,并提供您所在位置以及场景中对象位置的环境。
轴网和标高概述
轴网是一系列线,这些线的交点即是轴网点。
注: 模型可以不包含轴网系统,也可以包含一个或多个轴网系统,您可以选择要显示的轴网系统。
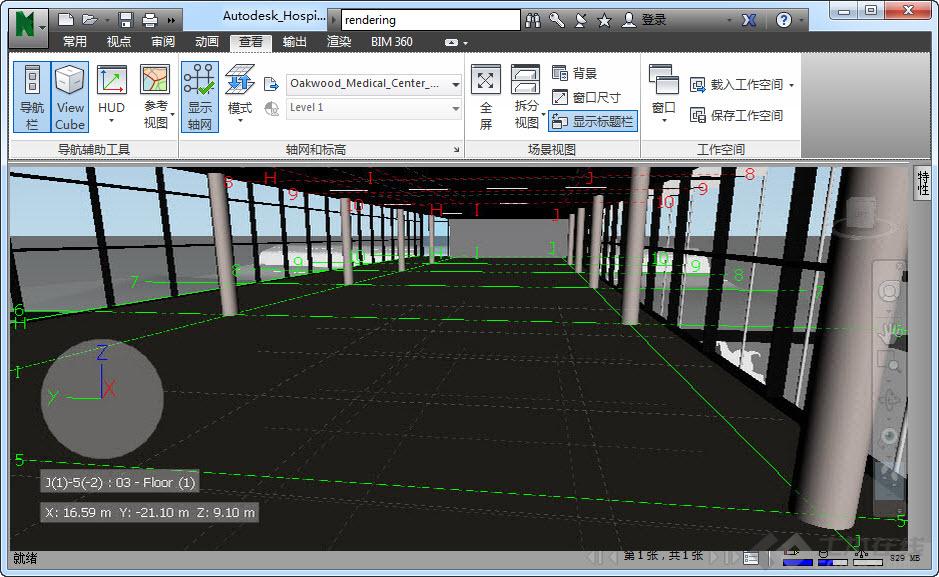
在建筑的每一层都显示轴网和标高,默认情况下相对于相机位置来配置轴网和标高。例如,如果您站在建筑模型的第二层,则在您下面的地板上轴网将以绿色显示,而在您上面的地板上轴网将以红色显示。您可以根据需要更改轴网的显示标高和显示颜色。
轴网位置显示在“平视显示仪”中,其中显示相机相对于活动轴网的轴网和标高位置。HUD 显示基于距离当前相机位置最近的轴网交点以及当前相机位置下面的最近标高。
您可以自定义轴网显示的颜色、轴网标签上的字体大小,以及轴网线被对象挡住时是否通过透明方式绘制(称为 X 射线模式)。
在将轴网系统导入到 Autodesk Navisworks 之前,可以将其应用于 Revit 中的模型。
注: 要使用轴网和标高的完整功能,您必须设置透视相机才能查看模型。设置正交相机时,只有选择面视图(例如俯视图或前视图)时,才会显示轴网和标高,但并非所有功能都可用。
轴网和标高透视相机投影
轴网和标高正交相机投影

轴网模式
轴网模式提供了许多有关如何在“场景视图”中显示轴网和标高的选项。
在 Autodesk Navisworks 中,默认的轴网模式将在“场景视图”中显示轴网的上方标高和下方标高。您可以根据以下条件,相对于相机位置选择显示轴网标高:
1.上方和下方。在紧挨相机位置上方和下方的级别上显示活动轴网。
2.上方 。在相机位置正上方标高处显示活动轴网。
3.下方 。在相机位置正下方标高处显示活动轴网。
4.全部 。在所有可用级别上显示活动轴网。
5.固定 。在用户指定的一个级别上显示活动轴网。
注: 如果选择此选项,则可以在“显示标高”下拉列表中指定标高。
活动轴网
活动轴网是指用于您的模型的轴网系统中当前正在使用的轴网系统。
如果有多个轴网系统适用于您的模型,则可以选择您要使用的轴网系统,它将成为活动轴网。轴网系统来自您附加到模型的文件。条目根据其文件名命名。
控制导航的真实效果
对三维模型进行导航时,可以使用“视点”选项卡→ “导航”面板上的真实效果工具来控制导航的速度和真实效果。真实效果工具在二维工作空间中不可用。
重力
注: 此功能仅可以与碰撞一起使用。
碰撞提供体量,而重力提供重量。这样,您(作为碰撞量)在场景中漫游的同时将被向下拉。
注: “重力”仅可以与漫游导航工具一起使用。
例如,您可以走下楼梯或依随地形而走动。
蹲伏
注: 此功能仅可以与碰撞一起使用。
在激活碰撞的情况下围绕模型漫游或飞行时,可能会遇到高度太低而无法在其下漫游的对象,如很低的管道。通过此功能可以蹲伏在任何这样对象的下面。
激活蹲伏的情况下,对于在指定高度无法在其下漫游的任何对象,将在这些对象下面自动蹲伏,因此不会妨碍您围绕模型导航。
提示: 要临时蹲伏在某个较低的对象之下,请按住空格键以使导航继续。
碰撞
此功能将您定义为一个碰撞量,即,一个可以围绕模型导航并与模型交互的三维对象,并服从将您限制在模型本身内的某些物理规则。换句话说,您有体量,因此,无法穿过场景中的其他对象、点或线。
您可以走上或爬上场景中高度达到碰撞量一半的对象,这样的话,举个示例而言,您可以走上楼梯。
碰撞量就其基本形式而言,是一个球体(半径为 r),可以将其拉伸以提供高度(高度为 h,h >= 2r)。请参见下图:
可以为当前视点或作为一个全局选项自定义碰撞量的尺寸。
注: “碰撞”仅可以与漫游和飞行导航工具一起使用。
启用碰撞后,渲染优先级会发生变化,这样相机或体现周围的对象与正常情况下相比,显示的细节更多。高细节区域的大小基于碰撞量半径和移动速度(需要了解将要漫游到什么位置)。
第三人视图
通过此功能可以通过第三人透视导航场景。
激活第三人后,将能够看到一个体现,该体现是您自己在三维模型中的表示。在导航时,您将控制体现与当前场景的交互。
将第三人与碰撞和重力一起使用时,此功能将变得非常强大,使您能够精确可视化一个人与所需设计交互的方式。
您可以为当前视点或作为一个全局选项自定义设置,如体现选择、尺寸和定位。
启用第三人视图后,渲染优先级会发生变化,这样相机或体现周围的对象与正常情况下相比,显示的细节更多。高细节区域的大小基于碰撞量半径、移动速度(需要了解将要漫游到什么位置)和相机在体现之后的距离(以了解与体现交互的对象)。