
随着全站仪在工程测量中的普及,使用既可任意置站,又可减少误差来源,同时还无需每次量取仪器高及棱镜高度的棱镜跟踪杆配合全站仪测量高程方法,已愈发受到广大测量人员青睐。通过已有工程实例证明,无量高全站仪三角高程测量法可使测量精度进一步提高、施测速度更快,特别适合于复杂环境下工程的应用。
随着全站仪在工程测量中的普及,使用既可任意置站,又可减少误差来源,同时还无需每次量取仪器高及棱镜高度的棱镜跟踪杆配合全站仪测量高程方法,已愈发受到广大测量人员青睐。通过已有工程实例证明,无量高全站仪三角高程测量法可使测量精度进一步提高、施测速度更快,特别适合于复杂环境下工程的应用。
1 无量高全站仪三角高程测量法
1.1 测点高程H测高法
(1)公式推导
图1为传统三角高程测量示意。设 H B 为 B 点高程,已知; H A 为 A 点高程,未知;现通过全站仪测定其他待测点的标高图1中, D 为 A 、 B 两点间的水平距离,即高斯投影平面上两点的距离; i 为测站点的仪器高。
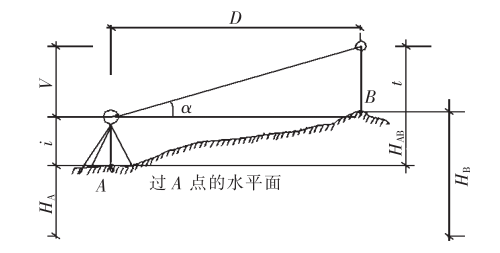
图1 传统三角高程测量示意
H A = H B - D tan α - i + t
式中: D tan α 即 V 值可用仪器直接测出, i 、 t 均未知,但因仪器置好后, i 值将随之不变,同时选取棱镜跟踪杆作为反射棱镜,棱镜高度值 t 也将不变。故待测点的高程为: H A + i - t = H B - D tan α = H 0 。 H A + i - t 在任意测站上固定不变,且可以计算出其测站点高程 H 0 。故有 H 求 = H 0 + D' tanα ' + i - t 。式中: H 求 为待测点高程; D' 为测站点到待测点的水平距离; α' 为测站点到待测点的观测垂直角。当 i =0、 t =0时, H 求 = H 0 + D' tanα ' 。
(2)操作过程
1)选择与已知高程点通视的位置将仪器任意置点。
2)测出 V 值,计算出 H 0 。
3)重新设定仪器测站点高程为 H 0 ,且设置仪器高及棱镜高为0。
4)照准待测点,测出其高程。
1.2 借高三维 Z 坐标测高法
(1)公式推导
借高三维 Z 坐标值测高法测量如图2所示, B = BM 为后视点 B 的高程代号。假设 B 点的高程 H ;已知, C 点的高程 H C 未知, A 点为任意置站点,通过全站仪测定 C 点的高程 H C 。
图2 借高三维Z坐标值测高法测量示意
由Z坐标测量原理可知:
式中: D tan α 即 V 值可以用仪器直接测出,测出 V 值后将仪器中仪高值i改设为( t - D tan α )值、将测站点 Z A 坐标设置为基准点高点 H B 。测量中仪器置好后,仪器中的i值将随之不变,同时选取棱镜跟踪杆作为反射棱镜, t 值不变,由此可得如下公式。
Z B = Z B + D tan α + i - t = Z A + D tan α + i - t+ D tan α +( t - D tan α )- t = Z B
Z C = Z A + D' tan α' + i - t = Z B + D' tan α' + i - t = Z B + D' tan α' +( t - D tan α )- t = Z B + D' tan α' - D tan α
(2)操作过程.
1)将仪器任意置点,所选点位要求与已知高程点通视。
2)将仪器照准已知基准高程点,测出V值,并将仪器中仪高值改设为( t - D tan α )值。棱镜高t值在搬站前始终保持不变。
3)将测站点Z坐标设置为所视基准点高程值。
4)进入坐标测量功能界面,照准待测点测出其Z坐标,即为待测点高程。
2 工程验证
以图3所示工程项目测量线路为例,从GPS3基准点到GPS4基准点的直线距离为1777.159m,高差为0.562m,闭和差 f 为0.006m,满足四等水准测量要求。
图3 全站仪三 角高程测量示意
无量高全站仪三角高程测量法在建筑施工中的应用,可以快速准确地测得高程数据,且减轻了水准测量可能因转站多、高差过大及气候条件恶劣等因素引起的误差,大大降低了施工测量工作量和强度,还可以根据实际的地势条件,改变棱镜高,达到了仅在计算过程中减小调整的比值,即可计算出测点高程的效果。