
一、 什么是RTK技术? RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。 也就是说,RTK需要有另外一个设备作为基准站,基准站接收到的卫星信号通过无线通信网实时发给用户。用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量)。求解出的平面精度可达到1-2厘米。
一、 什么是RTK技术?
RTK(Real - time kinematic,实时动态)载波相位差分技术,是实时处理两个测量站载波相位观测量的差分方法,将基准站采集的载波相位发给用户接收机,进行求差解算坐标。
也就是说,RTK需要有另外一个设备作为基准站,基准站接收到的卫星信号通过无线通信网实时发给用户。用户接收机将接收到的卫星信号和收到基准站信号实时联合解算,求得基准站和流动站间坐标增量(基线向量)。求解出的平面精度可达到1-2厘米。
相比较而言,普通搭载的GPS接收机,精度一般只能达到米级别。至于为什么搭载普通GPS的无人机也能做到稳定悬停,这就离不开其他系统的辅助,最重要的就是惯性导航系统,再辅以视觉识别和超声波定高等方式,即可让无人机做到在空中纹丝不动地“钉钉子”。
而具备RTK的飞机,只要将基站位置架在已知坐标点的位置上,就可以精确计算出移动站(也就是无人机)的精确位置。
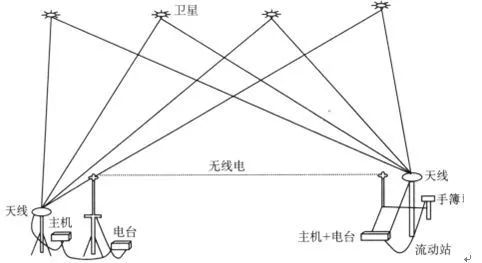
上述图片大家可以看到,RTK的工作原理,离不开基站和流动站直接、实时的无线电通讯。RTK测量系统一般由三部分组成:GPS接收设备、数据传输系统和实施动态测量的软件系统。
RTK测量技术是以载波相位观测量为根据的,有快速高精度定位功能的载波相位差分测量技术,它能够实时获得测站点在指定坐标系中的三维定位结果,且具有厘米级的定位精度。
RTK的工作原理,离不开基站和流动站直接、实时的无线电通讯。但是这样问题就来了,如果距离过远,是不是会跟我们飞机的遥控器一样失控而导致无法精准定位呢?这就是我们接下来要介绍的这项可以解决这个问题的这项技术。
二、 PPK的作业原理
PPK(Post-Processing Kinematic,GPS动态后处理差分)技术的工作原理是利用一台进行同步观测的基准站接收机和至少一台流动接收机,对GPS卫星进行同步观测;也就是基准站保持连续观测,初始化后的流动站迁站至下一个待定点,在迁站过程中需要保持对卫星的连续跟踪,以便将整周模糊度传递至待定点。
基准站和流动站同步接收的数据在计算机中进行线性组合,形成虚拟的载波相位观测量,确定接收机之间的相对位置,最后引入基准站的已知坐标,从而获得流动站的三维坐标。
PPK技术是最早的GPS动态差分技术方式(又称半动态法、准动态相对定位法、走走停停(Stop and Go)法),它与RTK技术的主要区别在于:在基准站和流动站之间,不必象RTK那样,建立实时数据传输,而是在定位观测后,对两台GPS接收机所采集的定位数据进行测后的联合处理,从而计算出流动站在对应时间上的坐标位置,其基准站和流动站之间的距离没有严格的限制。它的优点是定位精度高、作业效率高、作业半径大、易操作。
三、RTK和PPK的比较
推荐资料(点击文字跳转):
无人机低空摄影与土石方测量中的常规操作设计方案
无人机在电力线路选线设计中的应用.ppt
知识点:测绘无人机的RTK和PPK技术