不好意思,现在在北京出差呢,剩下的没时间编辑了,而且剩下的我感觉不如前面的作用大,以后有时间再进行编辑吧,不好意思了现在把原版的文件传上来不定时更新哈,因为公司有事情,我什么时间有空就什么时候更新,不好意思了目录:2楼--------第一章 PLC概述3楼--------第二张 可编程控制器原理4楼--------第三章 系统特性及硬件构成5楼--------第四章 编程语言 指令及其结构操作数
现在把原版的文件传上来
不定时更新哈,因为公司有事情,我什么时间有空就什么时候更新,不好意思了
目录:
2楼--------第一章 PLC概述
3楼--------第二张 可编程控制器原理
4楼--------第三章 系统特性及硬件构成
5楼--------第四章 编程语言
指令及其结构操作数
标识符及标识参数操作数的表示法
位逻辑指令
位逻辑运算指令
“与”、“或”、“异或”指令
输出指令
例一 二分频器
例二风机监控程序
例三启动和自锁程序
例四优先程序
6楼--- 例五灯泡控制程序
例六双作用气缸连续往复运动控制
练习:编制电动机点动和连续运转控制程序。
练习:编制双控灯控制程序,要求开关K1或K2任意一个开关的开和关的操作均可以控制灯L的亮和灭。完
成后可再编制三控灯。
置位/复位指令
RS触发器
例一控制传送带
例二 双缸顺序动作控制程序
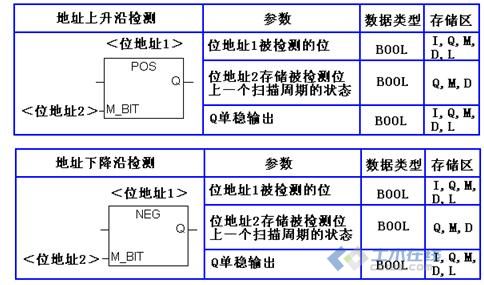
7楼----RLO上升沿、下降沿检测指令
地址上升沿、下降沿检测指令
对RLO的直接操作指令
例一 检测传送带的方向
例二二分频器
例三传送带定位控制
练习:第一次按按钮指示灯亮,第二次按按钮指示灯闪亮,第三次按下按钮指示灯灭,如此循环,试编写
其PLC控制的LAD程序。
定时器指令
例一脉冲发生器
例二频率监测器
例三顺序循环执行程序
例四电动机顺序启动控制程序
例五分段传送带的电动机按制程序
8楼————习题
1、抢答器 无答案
2、若传送带上30s内无产品通过,检测器下的检测点则报警
3、灯先后亮
4、顺序启动停止
5、交通灯
6、气缸来回控制
8、多种液体自动混合装置的PLC控制
9、3层电梯控制
10、霓虹灯广告屏控制器的设计
9楼————4.2.3 计数器指令
1.计数器的组成
2.计数器指令
3. 计数器的梯形图方块指令
计数器应用举例:
例一 计数器扩展为定时器
例二 长时间延时程序
例三 货仓区的控制
例四 气缸运动计数控制
联系:当X0接通,灯Y0亮;经5s后,灯Y0灭,灯Y1亮;经5s后,灯Y1灭,灯Y2亮,再过5s后,灯Y2灭,
灯Y0亮,如此顺序循环10次后自动停止。
10楼————4.3 数字指令
4.3.1 装入和传送指令
4.3.2 比较指令
4.3.3 算术运算指令
例一 解数学问题
练习:(1)自动售货机的PLC控制
例二 时钟脉冲发生器
练习:
当按启动按钮时,L1灯以0.5s的周期闪烁,L2灯以1s的周期闪烁,L3灯以2s的周期闪烁,
L4灯以4s的周期闪烁,
按下停止按钮,所有灯熄灭。
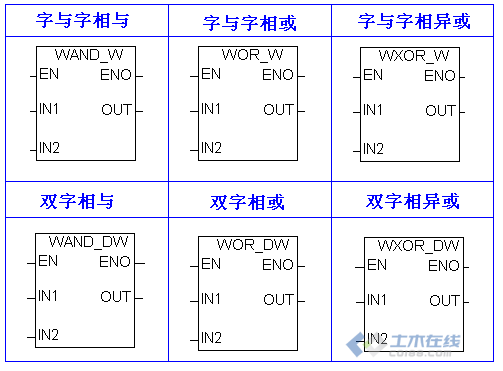
11楼————4.3.4 字逻辑运算指令
4.3.5 移位和循环移位指令
例一 彩灯控制
例二双缸顺序动作回路A1B1B0A0
12楼————霓虹灯广告屏控制器的设计
十字路口的交通指挥信号灯
依次按8次按钮I 0.1时,8盏指示灯依次亮,再依次按8次按钮I 0.1时,8盏指示灯依次灭,
按I 0.0开始新的循环操作,
任何时候按I 0.2时所有的灯灭。
按下开关I0.0,L1、L2、L3、L4依次亮灭,周而复始,时间间隔为1S
用PLC控制三个霓虹灯闪烁的程序
编制智力竞赛抢答器控制程序(没有答案)
13楼————4.3.6 打开数据块指令
4.4 控制指令
4.4.1 逻辑控制指令
4.4.2 程序控制指令
4.4.3 主控继电器指令
14楼————STEP7 的使用:
如何监控变量和强制变量
PLCSIM的使用
我从电脑中无意发现的一个教程,基于西门子PLC讲的,看了开头,感觉还不错,里面有很多例程~希望能对大家有所帮助,这个整理完成后再把电子版的传上来,推荐新入门的同行能把这个帖子完整的看下来,电子版的下载了我想很多都是放那里不看
书非借不能读也。。。。。。。
[ 本帖最后由 wuyounanhai 于 2010-4-14 14:52 编辑 ]